
by Bethany Augliere Tuesday, December 18, 2018
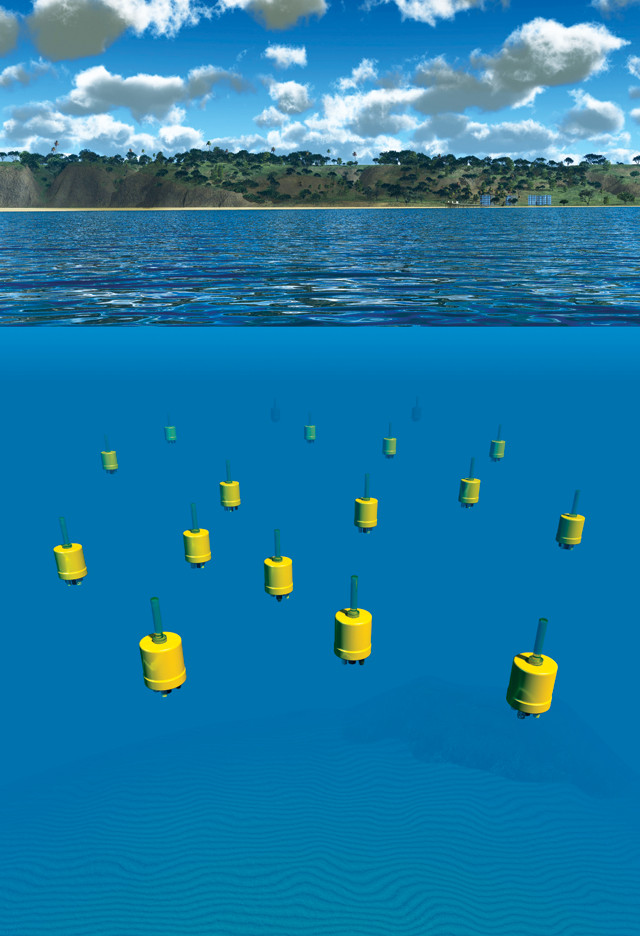
When Scripps biological oceanographer Peter Franks needed a way to mimic planktonic movements in the ocean, Scripps research oceanographer Jules Jaffe created low-cost "miniature autonomous underwater explorers," or M-AUEs. The M-AUEs can be deployed in swarms to track planktonic movements as well as small-scale circulation patterns, oil spill dispersion or even sewage movement. Credit: Jaffe Lab for Underwater Imaging, Scripps Oceanography, UC San Diego.
In 1999, Peter Franks, a biological oceanographer at Scripps Institution of Oceanography in San Diego, published a hypothesis that, to his knowledge, nobody had previously considered. Using a mathematical model, he showed how tiny zooplankton and phytoplankton could interact with ocean currents driven by internal waves — slow-moving waves within the ocean that form between water layers of differing density — and form patchy bands running parallel to shorelines. These patches of plankton could benefit from being squeezed together by wave action, he thought, by being better able to feed, survive or even reproduce.
In addition to illuminating fundamental information about plankton behavior and movement, understanding plankton transport mechanisms in the ocean has many other implications, including for commercial fisheries of lobsters, oysters and crabs, which rely on ocean currents to transport their larval stages.
The problem was that Franks couldn’t test his hypothesis in the field because it required tracking the movements of plankton patches as they drift. And the technology to do that simply did not exist.
Looking for help, Franks turned to his Scripps colleague, Jules Jaffe, an oceanographer with whom he’d begun collaborating several years earlier. Jaffe’s work involved building custom instruments and developing new technologies for use in oceanographic research. For instance, he helped design the optical system aboard the imaging sled that was used to find the remains of the Titanic in 1985. Developing new technologies for scientists is still his goal today, Jaffe says. He’s motivated to help when he hears a biologist say, “‘Wow, I really could use that data because it’s going to tell me something I would like to know.'”
Franks needed an autonomous robotic technology that would mimic the movements of the plankton he was studying, and he paired with Jaffe, who was already working on prototypes. One early version resembled Sputnik — a basketball-sized, milled aluminum sphere that would drift below the surface. But to mimic plankton, the robots needed to be smaller, and they needed to be less expensive. They also needed to be trackable underwater, and to have the capability to maintain a specified depth, to adjust their buoyancy to sink and rise to different depths, and to swim against vertical currents. These were significant technical challenges, Jaffe says. For a few years, he experimented with different designs before finally coming up with one that would work. After Jaffe and Franks received a $1 million grant from the National Science Foundation in 2009, Jaffe set out to build about 20 miniature autonomous underwater explorers, or M-AUEs, that could mimic planktonic movements in the ocean.
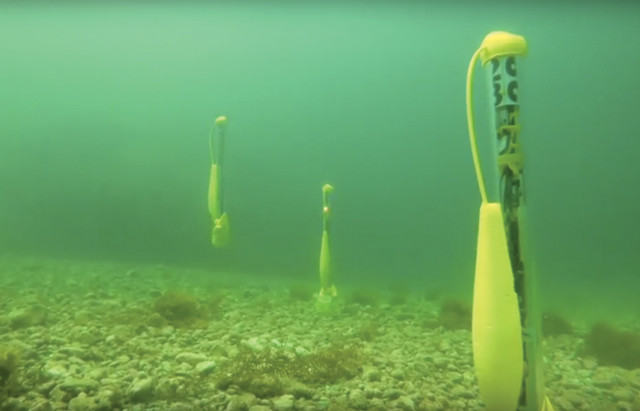
Jaffe’s latest version of the tiny robot resembles a Minion, one of the little yellow cartoon characters from the “Despicable Me” movies. The 1.5-liter cylinders can be programmed to move up and down in the water column and are equipped with temperature and pressure sensors, as well as underwater microphones called hydrophones. By deploying dozens of these robots at a time, scientists can capture a three-dimensional picture of the ocean and marine life.
Biological research in the ocean “suffers badly from only measuring one point at a time, or one line at a time,” Jaffe says. “So, how do we figure out a way to sample this three-dimensional space? I think that still haunts oceanography. The answer to me, and I think to a lot of people now, is to build swarms of robots.”
While Jaffe and Franks built their M-AUEs to investigate plankton ecology, such M-AUEs have many other applications as well. The hope is that one day these coffee can-sized robots can be deployed across the world to track everything from oil spills to harmful algal blooms to sewage, or even to look at how juvenile animals move between marine protected areas, Jaffe says. So much is unknown about small-scale dynamics in the oceans that the possibilities for using swarms of small floats are nearly endless.

M-AUEs are designed to mimic plankton and other organisms, such as crab larvae, as they move in the oceans. Franks had hypothesized that plankton and larvae moved in bands along the shorelines, and the M-AUE research confirmed his hypothesis. Credit: image: Peter Franks; inset: NOAA.
In the 20th century, ocean observations came mostly from shipboard instruments, towed arrays dragged behind ships or from moored buoys. In addition to these technologies, many robotic technologies exist today to study the ocean, from floats of various sizes that drift with currents while also moving vertically through the water column, like the M-AUEs, to remotely operated vehicles and self-propelled autonomous underwater vehicles, like the REMUS (Remote Environmental Monitoring Units) craft developed at the Woods Hole Oceanographic Institution. These technologies allow scientists to measure and understand ocean dynamics, like the directions and speeds of currents, as well as physical characteristics like temperature and salinity.
The 4,000 or so Argo floats that are deployed across the world's oceans today make up one of the earliest and best-known arrays of autonomous floats. The battery-powered floats freely drift at 2,000 meters depth and rise to the surface about every 10 days to transmit their data back to shore via satellites. Credit: Veronica Tamsitt, CC BY 2.0.
One of the most well-known float systems is the Argo array, a global collection of 4,000 free-drifting battery-powered floats that drift at 2,000 meters depth. Every 10 days, a given float rises to the surface while measuring temperature and salinity, and transmits those data back to shore via satellites. Once the data are transmitted, the floats sink again and resume their drifting. That cycle continues until the unit’s battery runs out, typically after about five years.
Argo floats were initially deployed in 2000, and about 800 new ones are deployed each year. Argo is the first system to provide a broad survey of information about oceanic characteristics, particularly below the surface, and has improved scientific understanding of the role of oceans in global climate and the accuracy of climate prediction.

Each Argo float costs about 5,000 — three times the cost of the M-AUEs — and weighs about 40 kilograms. Credit: Veronica Tamsitt, CC BY 2.0.
Argo continues to expand, with researchers adding biological monitoring capabilities to the floats for the Southern Ocean Carbon and Climate Observations and Modeling project (SOCCOM). From 2014 to 2017, the SOCCOM team deployed about 100 augmented Argo floats in the Southern Ocean that, in addition to salinity and temperature, are measuring pH, nitrogen and dissolved oxygen. They are also being used to reassess ocean-atmosphere carbon dioxide fluxes around the Southern Ocean, long considered a major carbon sink: Data from the SOCCOM floats have recently shown that the Southern Ocean releases significantly more carbon dioxide than previously thought.
However, the Argo floats do not work for all purposes. For one thing, they are meant to study processes across large scales, like whole ocean basins. They’re also expensive to build and deploy — each one costs $15,000, not including costs to conduct experiments or analyze the data. And they’re bulky, weighing 40 kilograms and requiring a large research vessel to deploy. Additionally, they cannot be tracked in real time and their data are only relayed when they surface.

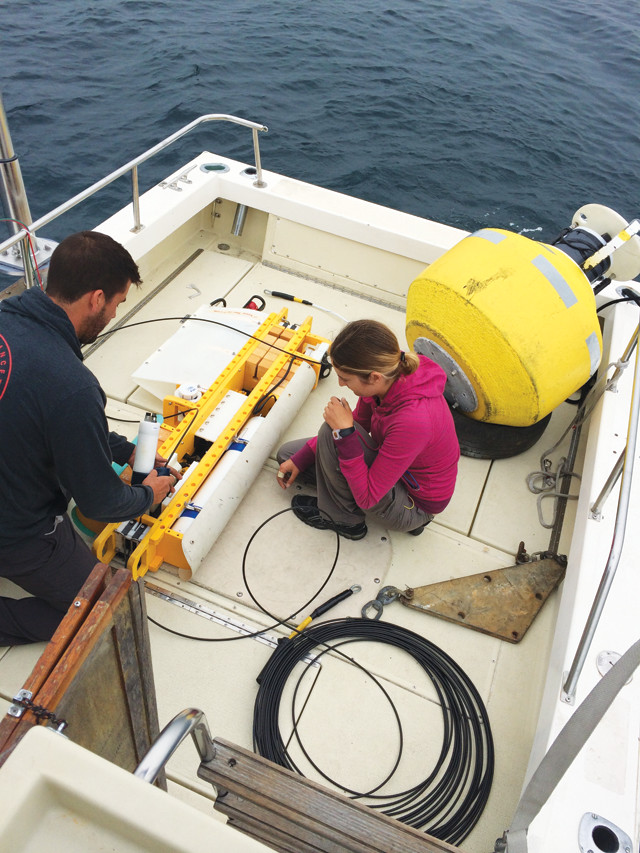
Jaffe (left) and Franks developed the M-AUEs together. Franks told Jaffe what he needed to track plankton and larvae movement in the oceans, and Jaffe created the technology. Credit: Jaffe Lab for Underwater Imaging, Scripps Oceanography, UC San Diego.
With smaller robots like the M-AUEs that Jaffe developed, scientists can sample ocean characteristics on local or regional scales (less than about 10 kilometers), including processes that occur in minutes and over a few hundred meters, like internal waves in shallow waters. In the last 10 to 15 years, researchers have begun studying submesoscale flows and their dynamics that occur on scales of 1 to 10 kilometers. These submesoscale currents are thought to be important for phytoplankton growth and the mixing of nutrients in the upper ocean, Franks says.
M-AUEs also have the advantage of being deployable from a small 6-meter boat. In addition, the devices are trackable in real time at the surface and their subsea trajectories are mappable. Moreover, each one only costs about $5,000, a third of the cost of an Argo unit and a price that will likely decrease in the future, Franks says. Because of the floats’ small size and cost, “now, all of a sudden, we can do coastal oceanography [studies] with swarms of miniature robots,” Jaffe says, which allows researchers to “measure things in many different places at the same time — that’s pretty cool.”
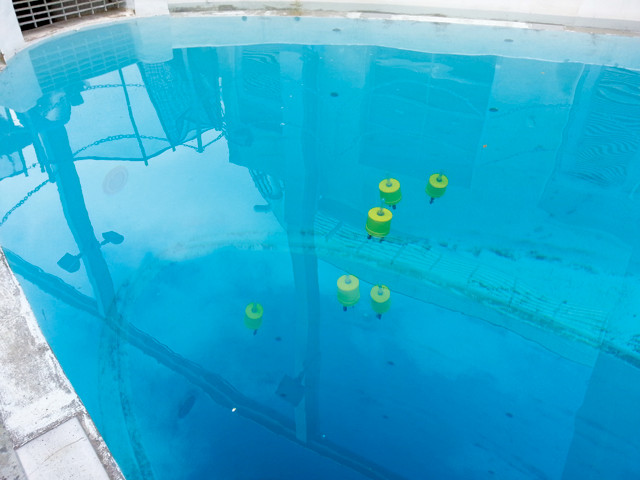
Jaffe and his team tested the M-AUEs in an experimental water tank hundreds of times to get the exact specifications needed. The most recent version of the M-AUEs is a 1.5-liter cylinder that can be programmed to move up and down in the water column. Credit: Jaffe Lab for Underwater Imaging, Scripps Oceanography, UC San Diego.
In their effort to study plankton movement, Franks and Jaffe program the M-AUEs to hover at a various depths within the upper 50 meters of the water column using buoyancy control. The researchers regulate the M-AUEs’ depth via movements of a small piston that is controlled by an onboard computer that continuously analyzes data from the M-AUEs’ sensors. Each float’s housing consists of two concentric foam cylinders forming inner and outer sleeves that can slide over each other to create large changes in the robot’s volume and buoyancy to bring each up to the surface for recovery. They have enough battery power and data storage capacity to last several days.
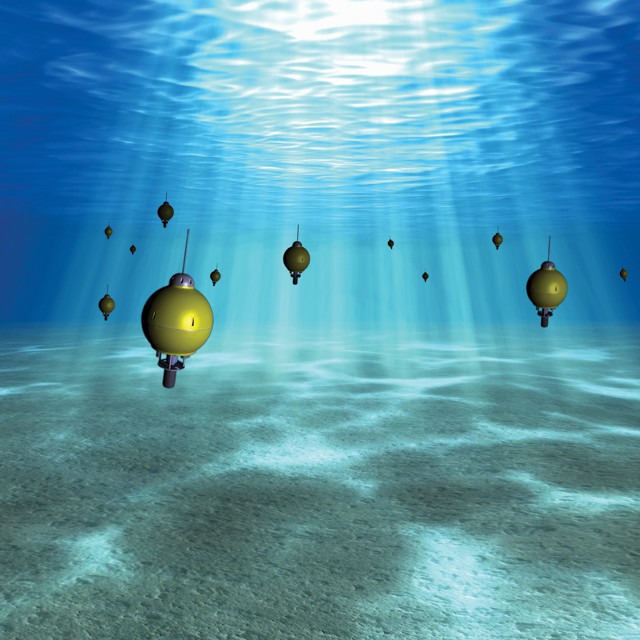
It took many incarnations of the M-AUEs, including this prototype from 2009 (artist's conception), to create ones that did exactly what Jaffe and Franks needed. Credit: Scripps Oceanography, UC San Diego.
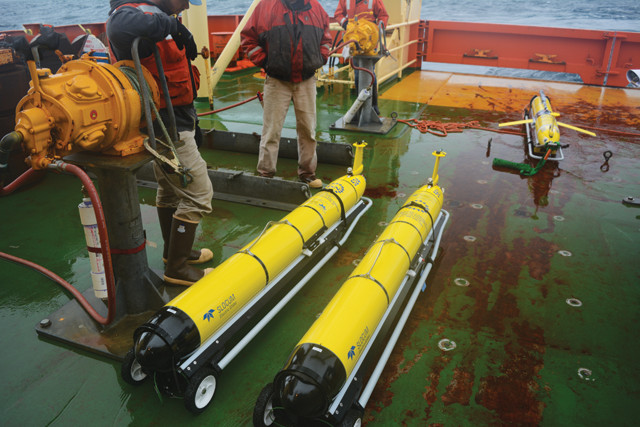
Drew Lucas and Jessica Garwood prepare the Wirewalker for deployment. The Wirewalker is a profiling vehicle powered by waves and developed by the Ocean Physics Group at Scripps. It was used in experiments in 2016 to measure water properties (salinity, temperature, oxygen, fluorescence). Wirewalker data were transmitted via a cellular network every 20 minutes and were used to inform M-AUE deployments. Credit: Captain Ryan Hersey.
One of the biggest challenges in developing the M-AUEs was figuring out how to track them continuously; equipping them with GPS receivers wouldn’t work because they’d be underwater, and Jaffe and Franks did not want the units to have to resurface during their deployment, as Argo floats do. So Jaffe designed an acoustic system to track them continuously under water. The system uses GPS-equipped moorings that float at the water’s surface and send out sonar pings to the M-AUEs every 12 seconds. The pings are recorded by the robots’ hydrophones. The researchers then use those data to calculate the locations of the robots.
Another major challenge, Jaffe says, was programming the computers aboard the M-AUEs to understand their own changes. Jaffe discovered — via repeated trial and error in an experimental tank in his lab — that the M-AUEs are compressed a little by water pressure as they go deeper, which changes their buoyancy. When that happens, he says, the onboard computer must recognize and compensate for it to maintain the correct depth. Creating an algorithm by which the computer could make such corrections wasn’t easy, he says, but after a few hundred attempts, they managed to do it. Another part of this challenge was keeping the M-AUEs within a half meter or where the researchers want the robots to be. “That’s not easy because there are vertical currents in the ocean as well as horizontal ones, along with buoyancy and density changes,” he says.

Using external ports, the target depths of the M-AUEs were quickly programmed on board, based on the latest water column data transmitted by the Wirewalker. Credit: Devin Ratelle.
All the challenges of this project required technical innovations, Jaffe says. “We struggled with a number of different aspects of it, but if you bang your head against the wall long enough, sometimes the wall gets soft,” he says with a laugh. And ultimately, they succeeded. The M-AUEs’ size and affordability, and the scientists’ ability to program the floats’ buoyancy, meant Franks could finally test his plankton hypothesis in the field.
In 2015, Franks, Jaffe and a team from Scripps deployed 16 M-AUEs — programmed to stay 10 meters below the surface, a depth where internal waves form — off the coast of Southern California near La Jolla. Over five hours, the team tracked and followed the floats, which constantly adjusted their buoyancy to remain at the programmed depth.

After a successful deployment in 2016, local fishermen noticed the M-AUEs surfacing and recovered them before the Scripps Oceanography team could get to them. As the researchers monitored the location of the M-AUEs, they could not believe how fast the units were traveling (courtesy of hitching a ride on the fishing boats, though that was unbeknownst to the team). When the M-AUEs finally stopped moving, the Scripps team plotted their location on a map and showed it to Captain Ryan Hersey. "That's the marina bar! Looks like the M-AUEs have gone for a drink after a long day of work," Captain Hersey commented, laughing. The M-AUEs were successfully returned to the Scripps team, thanks to a "Reward for Return" note on the units. Credit: Devin Ratelle.
The data supported Franks’ hypothesis. With the pressure and temperature sensors, Franks could see that internal waves pushed the M-AUEs together over the trough of the waves and dispersed the robots as the wave crests moved past. “It was so exciting,” Franks says. “I whooped with joy. Just watching the waves propagate though the swarm was utterly astounding. It was the coolest thing I’ve ever seen; it’s still is the coolest thing I’ve ever seen.”
With the results from the 2015 deployment, Franks felt he had proved that internal waves are capable of causing plankton to form shore-parallel bands. The next step was figuring out whether they could transport plankton onshore. In 2016, Jessica Garwood, a graduate student working with Franks, deployed 16 robots twice a day for two weeks off the coast of San Diego.
Since that 2016 deployment, Garwood has been combing through the data. She says she is particularly excited about a 15-minute segment during her experiments. During this period, she found that the interaction between the internal wave and the surface current pushed the M-AUEs to shore faster than expected. Subject to just the internal-wave currents, the planktonic impersonators would have moved to shore at a velocity of less than 2 centimeters per second. However, when the internal wave interacted with the surface current, the floats moved at up to 15 to 20 centimeters per second. The work has revealed a mechanism of plankton transport — relevant to swimming plankton — not previously described in scientific literature, Garwood says, noting that she can’t share all the details because the team’s latest results have not been published yet. “Nobody has really brought this idea forward, so I’m really excited about what I’m working on right now,” she says.
“The more we understand the mechanisms that transport [plankton], the better we can estimate how far away from their original populations larvae might disperse, and how this might be affected by a warming ocean,” Garwood says.
Like Franks, Steven Morgan, an oceanographer at the University of California, Davis, is also using robots to study how and where zooplankton move. “We put radio collars on mountain lions, deer and all this wildlife to get an idea of how far they disperse and how many survive. We just don’t have that information for [larval] marine organisms,” Morgan says. “It’s a really fundamental piece of biology that we don’t [understand].”
Morgan has spent his career studying and surveying the microscopic larval stages of marine invertebrates and fish along the coast of Northern California. Surveying can tell him where different species are at various points in their life cycles, but not how they are traveling. In recent years, his goal has been to prove that some of these tiny critters can in fact swim and control where they go. Without physical evidence, though, that’s hard to do, he says.
“Most people think plankton are just passively transported by currents — hapless victims of their environment,” Morgan says. But “these are animals; they have behaviors, they are adapted to their environment,” he says. “What we’ve been finding over the years is that their vertical swimming behavior is pretty effective at enabling larvae to regulate their movement.” To track that movement, Morgan is building his own tiny robotic floats.
Morgan is collaborating with retired North Carolina State University biologists, Tom Wolcott and Donna Wolcott, who designed a small seafaring robot called ABLE(Autonomous Behaving Lagrangian Explorer). Like the M-AUEs, ABLEs, which look like yellow fire extinguishers, can be tracked in real time at the surface, programmed to regulate their depth, and come equipped with sensors to monitor depth, salinity and temperature every 10 seconds. They’re also small and inexpensive, so Morgan and his colleagues can deploy many at a time.
Morgan programs the robots to mimic the natural behavior of various planktonic larvae. Some robots are programmed to stay low in the water column, and others are programmed to rise from depth at night, simulating how over half of surveyed species stay close to shore. Other robots simulate a third common behavioral pattern of residing high in the water column for the first part of their lives and descending later in development. Larvae with this behavior get carried out to sea with surface currents, and once they mature, they swim deeper into shoreward-flowing currents. Once they arrive closer to shore, they metamorphose into juveniles and grow into adults.

Other researchers, such as Tyler MacCready, are also developing swarms of miniature robots for multipoint oceanographic studies. MacCready created stick-shaped Data Divers that can coordinate with other units to descend on command and travel along the seafloor. His latest prototype is the SwarmDiver, which can respond to its environment and to other robots in the swarm. Credit: Apium, Inc..
Since 2015, Morgan and his team repeatedly deployed nine robots in the northern end of Bodega Bay off the coast of Northern California, which has a more complex circulation pattern compared to a straight coastline. When winds are northwesterly, currents travel southward, but during wind relaxations, the water flows out of the bay and northward along the coast.
The team tracked the ABLEs for 24 hours on 12 different occasions during strong northwesterly winds, and on 12 more occasions during wind relaxations. They programmed each of the ABLEs with one of three behaviors to mimic larvae: stay 2 meters off the bottom, stay 2 meters from the surface or vertically migrate over the day-night cycle.
The size of SwarmDivers — less than a meter long — makes them easy to deploy. Credit: Apium, Inc..
As Morgan had expected, the plankton-mimicking robots rode the ocean currents like a conveyor belt, he says, and used the water column to travel in different directions. After decades trying to determine if larvae can swim well enough to overcome the push and pull of currents and to regulate their movement based on their position in the water column, “this now is going to be concrete evidence” that they can, he says.

Once the SwarmDivers are deployed, they dive from the surface to the seafloor, where they can travel up to 7 kilometers in one hour. Credit: Apium, Inc..
Now, Morgan’s team is deploying ABLEs simulating multiple behaviors for up to three weeks to determine how far larvae of species with different behaviors disperse. He also wants to track them in estuaries.
Following these larvae will answer fundamental ecological questions along the California coast, Morgan says, such as how far and where the larvae of different species travel. This in turn can help scientists and managers figure out how these animals disperse and settle along the coast, and the connection among marine protected areas. Knowing that information can help address larger conservation conundrums, such as how to best manage fisheries, how invasive species are spreading and how climate change is affecting larval dispersal.
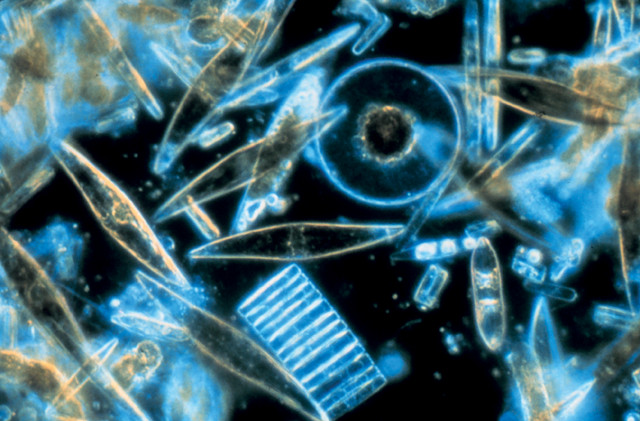
Jaffe says the key to understanding how plankton, such as the above: phytoplankton from McMurdo Sound, Antarctica, move in the oceans is to build swarms of robots. Credit: NOAA.
Other researchers are developing swarms of robots for multipoint oceanographic studies as well. Under the direction of its founder, Tyler MacCready, Apium Swarm Robotics, based in Glendale, Calif., is building autonomous underwater vehicles. The prototype of the Data Diver looks like a stick, a little less than a meter long, that can coordinate with other divers to descend on command to the seafloor, travel up to 7 kilometers, and have a maximum speed of 7 kilometers per hour. With their streamlined design, the divers do particularly well in the surf zone, MacCready says.
The autonomous vehicles are programmed to respond to their environment and to the other robots in the swarm in order to act in unison (they’re currently being produced as SwarmDiver by Aquabotix). These divers can be deployed from the shoreline and can cruise around the ocean surface within a square-kilometer area, MacCready says. At the push of a button, they all take a vertical nose-dive toward the seafloor, about 50 meters down, currently their deepest operational depth. They can be programmed for different formations as well, such as a line, circle or uniform area coverage. Once back at the surface, the vehicles then transmit data, which offers a three-dimensional snapshot of the ocean relayed in near real time.
A medusa-like plankton from the Gulf of Mexico Credit: NOAA.
“We can send our vehicles out, and we can do one of these snapshots in a couple of minutes. Then, 15 minutes later we can do another,” MacCready says. “We can make a three-dimensional movie of how things” — like temperature, salinity, dissolved oxygen, sound velocity, chlorophyll and the presence of oil — “are evolving in a certain volume of water.” These capabilities can provide information that’s useful for nearshore mapping of the seafloor or currents, he says. MacCready says the U.S. Navy is interested in this technology because the robots could collect data and do tasks normally done by divers.
While a few scientists are working on using small autonomous vehicles to mimic plankton, other researchers are deploying similar robotic craft in large numbers for a variety of other applications. Oceanographers at the University of Washington used surface drifters in the Gulf of Mexico near the 2010 Deep Water Horizon oil spill to understand how oil disperses. Another study used drifters to examine how marine debris moves across the ocean surface, which could help track where trash and plastic end up.
Meanwhile, Jaffe and Franks are hoping to secure funding to make the next generation of M-AUEs even smaller. “I’d like to get these things down to the size of a Ping-Pong ball,” Franks says. Then, instead of using 20 at a time, they could put out thousands. “This combination of technology, physics and biology allows us to understand the biology in a much more insightful and deep way.”
© 2008-2021. All rights reserved. Any copying, redistribution or retransmission of any of the contents of this service without the expressed written permission of the American Geosciences Institute is expressly prohibited. Click here for all copyright requests.